| |
GAUSS Applications
Pre-written, customizable
GAUSS programs designed to
increase user productivity and extend GAUSS
functionality in the fields
of statistics, finance, engineering, physics,
risk analysis and more.
Algorithmic
Derivatives
|
A program for
generating GAUSS procedures for
computing algorithmic derivatives.
|
Bayesian Estimation Tools
|
The GAUSS Bayesian
Estimation Tools package provides a suite of tools for estimation and
analysis of a number of pre-packaged models.
|
Constrained
Maximum Likelihood MT
|
Constrained Maximum
Likelihood MT provides for the
estimation of statistical models by
maximum likelihood while allowing
for the imposition of general
constraints on the parameters, linear or
nonlinear, equality or inequality, as
well as bounds.
|
| Constrained
Optimization MT |
Basic sample statistics
including means, frequencies and
crosstabs. |
CurveFit
|
Nonlinear curve fitting.
|
Descriptive Statistics MT
|
Basic sample statistics
including means, frequencies
and crosstabs. This application is
thread-safe and takes advantage of
structures.
|
| Discrete
Choice |
A statistical package for
estimating discrete choice
and other models in which the dependent
variable is qualitative in some
way.
|
|
FANPAC MT |
Comprehensive suite of
GARCH (Generalized AutoRegressive
Conditional Heteroskedastic) models for
estimating volatility.
|
Linear
Programming MT
|
Solves small and large
scale linear programming problems
|
Linear
Regression MT
|
Least squares estimation.
|
Loglinear
Analysis MT
|
Analysis of categorical
data using loglinear analysis.
|
Maximum
Likelihood MT
|
Maximum likelihood
estimation of the parameters of
statistical models; uses structures,
allowing calls to be safely nested
or called in threaded programs, and some
calculations are themselves
threaded.
|
Nonlinear Equations MT
|
Solves
systems of nonlinear equations having as
many equations as unknowns.
|
Time Series MT
|
Exact ML
estimation
of VARMAX, VARMA, ARIMAX, ARIMA, and ECM
models subject to general
constraints on the parameters. Panel
data estimation. Unit root and
cointegration tests.
|
Algorithmic Derivatives
The
GAUSS AD 1.0 module is an application program
for generating GAUSS
procedures for computing algorithmic
derivatives. A major achievement
of AD is improved accuracy for optimization.
Numerical derivatives
invariably produce a loss of precision. The
loss of precision is
greater for standard errors than it is for
estimates.
At the default tolerance, Constrained Maximum
Likelihood (CML) and
Maximum Likelihood (Maxlik) can be expected
generally to have four or
five places of accuracy, whereas standard
errors will have about two
places. Accuracy essentially doubles with AD.
AD works independently of
any application to improve derivatives, and it
can be used with any
application that uses derivatives.
For some types of optimization problems,
convergence is accelerated.
Iterations are faster and fewer of them are
needed to achieve
convergence. The types of problems that will
see the most improvement
are those with a large amount of computation.
Constrained Maximum Likelihood 2.0.6+ and
Maximum Likelihood 5.0.7+ have been updated to
improve speed with AD.
Platforms: Windows, LINUX, and Mac.
Requirements: Requires GAUSS Mathematical and Statistical System 6.0 or the GAUSS Engine 6.0.
Bayesian Estimation Tools
The GAUSS Bayesian Estimation Tools package provides a suite of tools
for estimation and analysis of a number of pre-packaged models. The
internal GAUSS Bayesian models provide quickly accessible, full-stage
modeling including data generation, estimation, and post-estimation
analysis. Modeling flexibility is provided through control structures
for setting modeling parameters, such as burn-in periods, total
iterations and others.
GAUSS Bayesian internal models include
- Univariate and multivariate linear models
- Linear models with auto-correlated error terms
- HB Interaction and HB mixture models
- Probit models
- Logit models
- Dynamic two-factor model
- SVAR models with sign restrictions
Data loading and data generation
Users may load data into GAUSS for estimation and analysis using
standard intrinsic GAUSS procedures. However, in addition, the Bayesian
Analysis Module includes a data generation feature that allows users to
specify true data parameters to build hypothetical data sets for
analysis.
Individual modeling
Users can meet individual modelling needs by specifying key controls for the estimation algorithm including:
- Number of saved iterations
- Number of iterations to skip
- Number of burn-in iterations
- Total number of iterations
- Inclusion of an intercept
Easy to interpret stored results
The Bayesian application module stores all results in a single output
structure. In addition the Bayesian module graphs draws of all
parameters and the posterior distributions for all parameters.
- Draws for all parameters at each iteration
- Posterior mean for all parameters
- Posterior standard deviation for all parameters
- Predicted values
- Residuals
- Correlation matrix between Y and Yhat
- PDF values and corresponding PDF grid for all posterior distributions
- Log-likelihood value (when applicable)
Constrained Mamximum Lkelihood MT (CMLMT)
Constrained Maximum Likelihood MT provides for the estimation of
statistical models by maximum likelihood while allowing for the
imposition of general constraints on the parameters, linear or
nonlinear, equality or inequality, as well as bounds.
Features
- Parameter Estimation
- Statistical Inference – Wald, Bootstrap,
Confidence Limits by Inversion
- Heteroskedastic-consistent Covariance
Matrix of Parameters
- Profile Likelihood
- Weighted Maximum Likelihood
- BFGS, DFP, Newton, BHHH descent
algorithms
- Stepbt, Brent, Half Step, Augmented
Penalty, BHHH step, Wolfe’s Line Search
Methods
- Numerical Gradient, Hessian
Provide a GAUSS procedure for computing the
log-likelihood of your statistical model, and Constrained Maximum
Likelihood MT
does the rest. Using an iterative
Sequential Quadratic
Programming method parameter estimates along
with standard errors and
confidence limits are generated.
Example
Suppose we have a dependent variable that is
observed in several
ordered categories. We might estimate
coefficients of a
regression on this variable using the ordered
probit model:
where
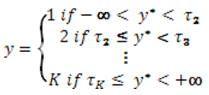
and

Assuming  we have we have

where where is
the Normal cumulative distribution function. where is
the Normal cumulative distribution function.
The log-likelihood function for this model is

The cmlmt
function that
performs the estimation takes four arguments,
(1) a pointer to the
procedure that computes the log-likelihood, (2)
a PV parameter
structure containing the start values of the
parameters, (3) a DS data
structure, and (4) a control structure.
GAUSS structures are simply bins containing
other objects such as
matrices, strings, arrays, etc. They can
be defined by the
programmer, but the two of the structures used
by cmlmt are defined in
the Run-Time Library, and the control structure
is defined in the cmlmt
library.
The PV
Parameter Structure
The
PV parameter structure is created and filled
using GAUSS Run-Time
Library functions. Using these functions
the structure can be
filled with vectors, matrices, and arrays
containing starting parameter
values. Masks can be used to specify fixed
versus free
parameters. For example,
struct PV p0;
// creates a default parameter structure
p0 = pvCreate;
p0 = pvPack(p0,.5|.5|.5,”beta”);
p0 = pvPackm(p0,-30|-1|1|30,”tau”,0|1|1|0);
The structure now contains starting values for a
3×1
vector of coefficients called beta,and another
4×1 vector of thresholds
called tau. It will be convenient for the
calculation of the
log-likelihood for the first and last be
parameters set to -30 and
+30. The fourth argument is a mask
specifying the first and last
elements of the vector to be fixed and the
remaining elements free
parameters to be estimated.
The DS Data
Structure
The
DS data structure is a general purpose
bucket of GAUSS types. It
contains one of each of the types, matrix,
array, string, string array,
sparse matrix, and scalar. It is
passed to the log-likelihood
procedure untouched by cmlmt. It can
be used by programmers in
any way they choose to help in computing the
log-likelihood.
Typically it is used to pass data to the
procedure. The DS
structure can also be reshaped into a vector
of structures giving the
programmer great flexibility in handling
data and other information.
load x[200,5] = data.csv;
struct DS d0;
// creates a 2x1 vector of
// default data structures
d0 = reshape(dsCreate,2,1);
// dependent variable
d0[1].dataMatrix = x[.,1];
// independent variables
d0[2].dataMatrix = x[.,2:4];
The cmlmtControl
Structure
This structure handles the matrices and
strings that
control the estimation process such as
setting the descent algorithm,
the line search method, and so on. It
is also used to specify the
constraints. For example the
thresholds need to be constrained in
the following way where . This implies
the two free constraints
The programmer will accomplish by specifing
two members of the
cmlmtControl structure, C and D, to impose
this inequality constraint
where x is the vector of parameters being
estimated. Then
struct cmlmtControl c0;
// creates a default structure
c0 = cmlmtControlCreate;
c0.C = { 0 0 0 -1 1
0,
0 0 0 0 -1 1 };
c0.D = { 0,
0 };
The first three columns of the matrix c0.C
and the vector c0.D are
associated with regression coefficients that
are unconstrained and the
last two are associated with the thresholds.
The Log-likelihood Procedure
The programmer now writes a GAUSS procedure
computing a vector of
log-likelihood probabilities. This
procedure has three input
arguments, the PV parameter structure, the
DS data structure, and 3×1
vector the first element of which is nonzero
if cmlmt is requesting the
vector of log-likelihood probabilities, the
second element nonzero if
it is requesting the matrix of first
derivatives with respect to the
parameters, and the third element nonzero if
it is requesting the
Hessian or array of second derivatives with
respect to the
parameters. It has one return
argument, a modelResults structure
containing the results.
proc orderedProbit(struct PV p, struct DS d,
ind);
local mu, tau, beta, emu, eml;
struct modelResults mm;
if ind[1] == 1;
tau =
pvUnpack(p,”tau”);
beta =
pvUnpack(p,”beta”);
mu =
d[2].dataMatrix * beta;
eml =
submat(tau,d[1].dataMatrix,0) – mu;
emu =
submat(tau,d[1].dataMatrix + 1,0) – mu;
mm.function =
ln(cdfn(emu) – cdfn(eml));
endif;
retp(mm);
endp;
The GAUSS submat function serves to pull out
the k-th element of tau for the i-th row of
d[1].datamatrix set to k.
Since this procedure doesn’t return a matrix
of first derivatives nor
an array of second derivatives they will be
computed numerically by
cmlmt.
The result stored in mm.function is an Nx1
vector of log-probabilities
computed by observation. If we were to
have provided analytical
derivatives, the first derivatives would be
an Nxm matrix of
derivatives computed by observation where m
is the number of parameters
to be estimated, and the second derivatives
would be an Nxmxm array of
second derivatives computed by
observation. Computing these
quantities in this way improves
accuracy. It also allows for the
BHHH descent method which is more accurate
than other methods
permitting a larger convergence tolerance.
It is also possible to return a scalar
log-likelihood which is the sum
of the individual log-probabilities.
In this case the analytical
first derivatives would be a 1xm gradient
vector, and the second
derivatives a 1xmxm array. You would
also need to set c0.numObs
to the number of observations since cmlmt is
no longer able to
determine the number of observations from
the length of the vector of
log-probabilities.
The Command File
Finally we put it all together in the
command file:
library cmlmt;
// contains the structure definitions
#include cmlmt.sdf;
// simulating data here
x = rndn(200,3);
b = { .4, .5, .6 };
ystar = x*b;
tau = { -50, -1, 0, 1, 50 };
y = (ystar .> tau[1] .and ystar .<=
tau[2]) +
2 * (ystar .> tau[2] .and
ystar .<= tau[3]) +
3 * (ystar .> tau[3] .and
ystar .<= tau[4]) +
4 * (ystar .> tau[4] .and
ystar .<= tau[5]);
struct DS d0;
// creates a 2x1 vector of
// default data structures
d0 = reshape(dsCreate,2,1);
// dependent variable
d0[1].dataMatrix = y;
// independent variables
d0[2].dataMatrix = x;
struct PV p0;
// creates a default parameter structure
p0 = pvCreate;
p0 = pvPack(p0,.5|.5|.5,"beta");
p0 =
pvPackm(p0,-30|-1|0|1|30,"tau",0|1|1|1|0);
struct cmlmtControl c0;
// creates a default structure
c0 = cmlmtControlCreate;
c0.C = { 0 0 0 -1 1
0,
0 0 0 0 -1 1 };
c0.D = { 0,
0};
struct cmlmtResults out;
out = cmlmt(&orderedProbit,p0,d0,c0);
// prints the results
call cmlmtprt(out);
proc orderedProbit(struct PV p, struct DS d,
ind);
local mu, tau, beta, emu, eml;
struct modelResults mm;
if ind[1] == 1;
tau =
pvUnpack(p,"tau");
beta =
pvUnpack(p,"beta");
mu =
d[2].dataMatrix * beta;
eml =
submat(tau,d[1].dataMatrix,0) - mu;
emu =
submat(tau,d[1].dataMatrix + 1,0) - mu;
mm.function =
ln(cdfn(emu) - cdfn(eml));
endif;
retp(mm);
endp;
This program produces the following output:
================================================================
CMLMT Version
2.0.7
3/30/2012 1:29 pm
=================================================================
return code = 0
normal convergence
Log-likelihood
-15.1549
Number of cases 200
Covariance of the parameters computed by the
following method:
ML covariance matrix
Parameters
Estimates Std.
err. Est./s.e.
Prob. Gradient
------------------------------------------------------------------
beta[1,1]
4.2060
0.2385
17.634
0.0000 0.0000
beta[2,1]
5.3543
0.2947
18.166
0.0000 0.0000
beta[3,1]
6.2839
0.2789
22.531
0.0000 0.0000
tau[2,1]
-10.7561
0.7437
-14.462
0.0000 0.0000
tau[3,1]
-0.0913
0.2499
-0.365
0.7148 0.0000
tau[4,1]
10.6693
0.5697
18.727
0.0000 0.0000
Correlation matrix of the parameters
1
0.52064502
0.54690534
-0.46731768
0.046211496 0.57202935
0.52064502
1
0.58363048
-0.47574225
-0.061765839 0.65959766
0.54690534
0.58363048
1
-0.5169026
-0.0059238287 0.69077806
-0.46731768
-0.47574225
-0.5169026
1
0.0046253798 -0.44858539
0.046211496 -0.061765839
-0.0059238287
0.0046253798 1
-0.01457591
0.57202935
0.65959766
0.69077806
-0.44858539
-0.01457591 1
Wald Confidence Limits
0.95 confidence limits
Parameters
Estimates Lower
Limit Upper Limit
Gradient
----------------------------------------------------------------------
beta[1,1]
4.2060
3.7355
4.6764
0.0000
beta[2,1]
5.3543
4.7730
5.9356
0.0000
beta[3,1]
6.2839
5.7338
6.8339
0.0000
tau[2,1]
-10.7561
-12.2230
-9.2893
0.0000
tau[3,1]
-0.0913
-0.5842
0.4015
0.0000
tau[4,1]
10.6693
9.5457
11.7929
0.0000
Number of iterations 135
Minutes to
convergence 0.00395
Constrained Optimization MT (COMT)
solves the Nonlinear Programming problem,
subject to general
constraints on the parameters – linear or
nonlinear, equality or
inequality, using the Sequential Quadratic
Programming method in
combination with several descent methods
selectable by the user:
- Newton-Raphson
- quasi-Newton (BFGS and DFP)
- Scaled quasi-Newton
There
are also several selectable line search
methods. A Trust Region method
is also available which prevents saddle
point solutions. Gradients can
be user-provided or numerically calculated.
COMT is fast and can handle
large, time-consuming problems because it
takes advantage of the speed
and number-crunching capabilities of GAUSS.
It is thus ideal for large
scale Monte Carlo or bootstrap simulations.
New
Features
- Internally threaded functions
- Uses structures
- Improved algorithm
- Allows for computing a subset of the
derivatives
analytically, and for combining the
calculation of the function and
derivatives, thus reducing calculations
in common between function and
derivatives
Threading
in COMT
If you have a multi-core processor you may
take advantage of COMT’s
internally threaded functions. An important
advantage of threading
occurs in computing numerical derivatives.
If the derivatives are
computed numerically, threading will
significantly decrease the time of
computation.
Example
We
ran a time trial of a covariance-structure
model on a quad-core
machine. As is the case for most real world
problems, not all sections
of the code are able to be run in parallel.
Therefore, the theoretical
limit for speed increase is much less than
(single-threaded execution
time)/(number of cores).
Even so, the execution time of our program
was cut dramatically:
Single-threaded execution time: 35.42
minutes
Multi-threaded execution time: 11.79 minutes
That is a nearly 300% speed increase!
The DS
Structure
COMT uses the DS and PV structures that
are available in the GAUSS Run-Time
Library.
The DS structure is completely
flexible, allowing
you to pass anything you can think of into
your procedure. There is a
member of the structure for every GAUSS data
type.
struct DS {
scalar type;
matrix dataMatrix;
array dataArray;
string dname;
string array vnames;
};
The PV
Structure
The PV structure revolutionizes how
you pass the
parameters into the procedure. No longer do
you have to struggle to get
the parameter vector into matrices for
calculating the function and its
derivatives, trying to remember, or figure
out, which parameter is
where in the vector.
If your log-likelihood uses matrices or
arrays,you can store them
directly into the PV structure and remove
them as matrices or arrays
with the parameters already plugged into
them. The PV structure can
handle matrices and arrays in which some of
their elements are fixed
and some free. It remembers the fixed
parameters and knows where to
plug in the current values of the free
parameters. It can also handle
symmetric matrices in which parameters below
the diagonal are repeated
above the diagonal.
b0 – Mean paramters.
garch – GARCH parameters.
arch – ARCH parameters.
omega – Constant in variance equation.
There is no longer any need to use global
variables. Anything the
procedure needs can be passed into it
through the DS structure. And
these new applications uses control
structures rather than global
variables. This means, in addition to thread
safety, that it is
straightforward to nest calls to COMT inside
of a call to COMT,
QNewtonmt, QProgmt, or EQsolvemt.
Example:
A Markowitz mean/variance portfolio
allocation analysis on a thousand
or more securities would be an example of a
large scale problem CO
could handle.
CO also contains a special technique for
semi-definite problems, and
thus it will solve the Markowitz portfolio
allocation problem for a
thousand stocks even when the covariance
matrix is computed on fewer
observations than there are securities.
Because CO handles general nonlinear
functions and constraints, it can
solve a more general problem than the
Markowitz problem. The efficient
frontier is essentially a quadratic
programming problem where the
Markowitz Mean/Variance portfolio allocation
model is solved for a
range of expected portfolio returns which
are then plotted against the
portfolio risk measured as the standard
deviation:
where l is a conformable vector of ones, and
where  is the
observed covariance matrix of the returns of
a portfolio of securities, and µ are their
observed means.
This model is solved for

and the efficient frontier is the plot of r k
on the vertical axis against
on the horizontal axis. The portfolio
weights in W k describe
the optimum distribution of portfolio
resources across the securities
given the amount of risk to return one
considers reasonable.
Because of CO's ability to handle nonlinear
constraints, more elaborate
models may be considered. For example, this
model frequently
concentrates the allocation into a minority
of the securities. To
spread out the allocation one could solve
the problem subject to a
maximum variance for the weights, i.e.,
subject to
where  is a
constant setting a ceiling on the sums of
squares of the weights.
correlation matrix
This data was taken from from Harry S.
Marmer and F.K. Louis Ng,
"Mean-Semivariance Analysis of Option-Based
Strategies: A Total Asset
Mix Perspective", Financial Analysts
Journal, May-June 1993.
An unconstrained analysis produced the
results below:
It can be observed that the optimal
portfolio weights are highly concentrated in
T-bills.
Now let us constrain w´w to be less than,
say, .8. We then get:
The constraint does indeed spread out the
weights across the categories, in particular
stocks seem to receive more emphasis.
 Efficient
portfolio for these analyses
Efficient
portfolio for these analyses
We see there that the constrained
portfolio is
riskier everywhere than the unconstrained
portfolio given a particular
portfolio return.
In summary, CO is well-suited for a variety
of financial applications
from the ordinary to the highly
sophisticated, and the speed of GAUSS
makes large and time-consuming problems
feasible.
CO is an advanced GAUSS Application and
comes as GAUSS source code.
GAUSS Applications are modules written in
GAUSS for performing specific
modeling and analysis tasks. They are
designed to minimize or eliminate
the need for user programming while
maintaining flexibility for
non-standard problems.

CurveFit
Given data and a procedure for computing the
function,
CurveFit will find a best fit of the data to
the function in the least
squares sense.
Special Features
- Weight observations
- Multiple dependent variables
- Bootstrap estimation
- Histogram and surface plots of
bootstrapped coefficients
- Profile t, and profile likelihood trace
plots
- Levenberg-Marquardt descent method
- Polak-Ribiere conjugate gradient descent
method
- Ability to activate and inactivate
coefficients
- Heteroskedastic-consistent covariance
matrix of coefficients
Bootstrap Estimation
CurveFit includes special
procedures for computing
bootstrapped estimates. One procedure produces
a mean vector and
covariance matrix of the bootstrapped
coefficients. Another generates
histogram plots of the distribution of the
coefficients and surface
plots of the parameters in pairs. The plots
are especially valuable for
nonlinear models because the distributions of
the coefficients may not
be unimodal or symmetric.
Profile t, and Profile Likelihood Trace
Plots
Also included in the module
is a procedure that
generates profile t trace plots and profile
likelihood trace plots
using methods described in Bates and Watts,
"Nonlinear Regression
Analysis and its Applications". Ordinary
statistical inference can be
very misleading in nonlinear models. These
plots are superior to usual
methods in assessing the statistical
significance of coefficients in
nonlinear models.
Descent Methods
The primary
descent
method for the single dependent variable is
the classical
Levenberg-Marquardt method. This method
takes advantage of the
structure of the nonlinear least squares
problem, providing a robust
and swift means for convergence to the
minimum. If, however, the model
contains a large number of coefficients to
be estimated, this method
can be burdensome because of the requirement
for storing and computing
the information matrix. For such models the
Polak-Ribiere version of
the conjugate gradient method is provided,
which does not require the
storage or computation of this matrix.
Multiple Dependent Variables
CurveFit allows multiple
dependent variables using a
criterion function permitting the
interpretation of the estimated
coefficients as either maximum likelihood
estimates or as Bayesian
estimates with a noninformative prior. This
feature is useful for
estimating the parameters of "compartment"
models, i.e., models arising
from linear first order differential
equations.
Platform: Windows, Mac, and Linux.
Requirements: GAUSS/GAUSS Light version 8.0 or higher.
Descriptive
Statistics
The procedures in Descriptive
Statistics MT 1.0
provide basic statistics for the variables in
GAUSS data sets. These
statistics describe and test univariate and
multivariate features of
the data and provide information for further
analysis. Descriptive
Statistics MT 1.0 is thread-safe and takes
advantage of structures.
- Includes methods for analyzing and
generating contingency
tables and statistics for them.
- Includes new routines to compute
descriptive statistics,
including both univariate and multivariate
skew and kurtosis.
- Includes support for date variables where
applicable.
- You can now choose between two report
types-all variables
in a single table or individual reports for
each variable-and
you can choose which statistics to include
in the report and
the order in which they appear.
Descriptive Statistics MT 1.0 has methods for
analyzing and generating contingency tables and
producing statistics for them:
- Chi-Squared (Pearson and Likelihood Ratio)
- Phi
- Cramer's V
- Spearman s Rho
- Goodman-Krustal's Gamma Kendall's Tau-B
Stuart s Tau-C Somer's D
- Lamda
Descriptive Statistics MT 1.0 also has methods
for generating frequency
distributions with statistics, skew and
kurtosis, and tests for
differences of means.
Platform: Windows, Mac and Linux.
Requirements: GAUSS/GAUSS Light version 8.0 or higher.
Discrete
Choice Choice Analysis 2.0 (New)
Discrete Choice Analysis Tools 2.0 provides an adaptable, efficient,
and user-friendly environment for linear data classification. It's
designed with a full suite of tools built to accommodate individual
model specificity, including adjustable parameter bounds, linear or
nonlinear constraints, and default or user specified starting values.
Newly incorporated data and parameter input procedures make model
set-up and implementation intuitive.
- Fast and efficient handling of large data sets
- Large scale data classification
- Publication quality formatted results tables with optional exportation
- Updated implementation simplifies data input, parameter control, and estimation
- New logistic regression modelling for large scale
classification including L2/L1 regularized classifiers and L2/ L1-loss
linear SVM with cross-validation and prediction
Discrete Choice Analysis Tool v2.0 is a next generation GAUSS discrete choice analytics tool for:
- Econometricians and Micro-economists
- Political choice researchers
- Survey data analysts
- Sociologist
- Epidemiologists
- Insurance, safety and accident analysts
- ...And more!
Supported Models: Encompasses a large variety of linear classification models:
- Large Scale Data Classification (New):
Performs large-scale binary linear classification using support vector
machines [SVM] or logistic regression [LR] methodology. Available
options include cross-validation of model parameters and prediction
plotting. Easy to access output includes estimated prediction weights,
predicted classifications and cross-validation accuracy.
- Adjacent Categories Multinomial Logit Model: The log-odds of one category versus the next higher category is linear in the cutpoints and explanatory variables.
- Binary Logit and Probit Regression Models: Estimates dichotomous dependent variable with either Normal or extreme value distributions.
- Conditional Logit Models:
Includes both variables that are attributes of the responses as well
as, optionally, exogenous variables that are properties of cases.
- Multinomial Logit Model: Qualitative responses are each modeled with a separate set of regression coefficients.
- Negative Binomial Regression Model (left or right truncated, left or right censored, or zero-inflated):
Estimates model with negative binomial distributed dependent variable.
This includes censored models - the dependent variable is not observed
but independent variables are available - and truncated models where
not even the independent variables are observed. Also, a zero-inflated
negative binomial model can be estimated where the probability of the
zero category is a mixture of a negative binomial consistent
probability and an excess probability. The mixture coefficient can be a
function of independent variables.
- Nested Logit Regression Model:
Derived from the assumption that residuals have a generalized extreme
value distribution and allows for a general pattern of dependence among
the responses thus avoiding the IIA problem, i.e., the "independence of
irrelevant alternatives."
- Ordered Logit and Probit Regression Models: Estimates model with an ordered qualitative dependent variable with Normal or extreme value distributions.
- Possion Regression Model (left or right truncated, left or right censored, or zero-inflated):
Estimates model with Poisson distributed dependent variable. This
includes censored models - the dependent variable is not observed but
independent variables are available - and truncated models where not
even the independent variables are observed. Also, a zero-inflated
Poisson model can be estimated where the probability of the zero
category is a mixture of a Poisson consistent probability and an excess
probability. The mixture coefficient can be a function of independent
variables.
- Stereotype Multinomial Logit Model: The coefficients of the regression in each category are linear functions of a reference regression.
Outputs:
Easy to access, store, and export:
- Predicted counts and residuals (New)
- Parameter estimates
- Variance-covariance matrix for coefficient estimates
- Percentages of dependent variables by category (where applicable)
- Complete data description of all independent variables
- Marginal effects of independent variables (by category of dependent variable, when applicable)
- Variance-covariance matrices of marginal effects
Reporting:
Performs and reports a number of goodness of fit tests including for model performance analysis:
- Full model and restricted model log-likelihoods
- Chi-square statistic
- Agresti's G-squared statistic
- Likelihood ratio statistics and accompanying probability values
- McFadden's Psuedo R-squared
- McKelvey and Zovcina's Psuedo R-Squared
- Cragg and Uhler's normed likelihood ratios
- Count R-Squared
- Adjusted count R-Squared
- Akaike and Bayesian information criterions
Platform: Windows, Mac, and Linux
Requirements: GAUSS/GAUSS Engine/GAUSS Light v14 or higher
FANPAC MT 3.0
The
Financial Analysis Application (FANPAC) provides econometric tools
commonly implemented for estimation and analysis of financial data. The
FANPAC application allows users to tailor each session to their
specific modeling needs and is designed for estimating parameters of
univariate and multivariate Generalized Autoregressive Conditionally
Heteroskedastic (GARCH) models.
Features
- Univariate ARCH, GARCH,
ARMAGARCH,FIGARCH
- Multivariate BEKK,
DVEC,CCC,DCC,GO,FM,VAR
- Normal, t, skew generalized t,
multivariate skew distributions
- Keyword interface
Supported models include:
- Diagonal vec multivariate models:
- GARCH model
- Fractionally integrated GARCH model
- GJR GARCH model
- Multivariate constant conditional correlation models:
- GARCH model
- Exponential GARCH model
- Fractionally integrated GARCH model
- GJR GARCH model
- Multivariate dynamic conditional correlation models:
- GARCH model
- Exponential GARCH model
- Fractionally integrated GARCH model
- GJR GARCH model
- Multivariate factor GARCH model
- Generalized orthogonal GARCH model
- Univariate time series models:
Modeling flexibility provided with user-specified modeling features including (when applicable):
- GARCH, ARCH, autoregressive, and moving average orders
- Flexible enforcement of stationarity and nonnegative conditional variance requirements
- Pre-programmed, user controlled Boxcox data transformations
- Error density functions (Normal, Student’s t, or skew t-distribution)
GAUSS FANPAC output includes:
- Estimates of model parameters
- Moment matrix of parameter estimates
- Confidence limits
- Time series and conditional variance matrices forecasts
FANPAC tools facilitates goodness of fit analysis including:
- Reported Akaike and Bayesian information criterion
- Computed model residuals
- Computed roots of characteristic equations
- GARCH time series data simulation
- Andrews simulation method statistical inference
- Time series ACF and PACF computation
- Data and diagnostic plots including:
- ACF and PACF
- Standardized residuals
- Conditional correlations, standard deviations, and variance
- Quantile-quantile plots
- Residual diagnostics including skew, kurtosis, and Ljung-Box statistics
Platform: Windows, Mac, and Linux.
Requirements: GAUSS/GAUSS Light version 10.0 or higher.
Linear Programming MT
Linear
Programming MT Module solves the standard
linear programming problem with the following
NEW and CUTTING-EDGE features:
- Thread-safe
Execution: Control
variables are model matrices are contained
in structures allowing
thread-safe execution of programs.
- Sparse matrices:
Linear Programming MT
exploits sparse matrix technology permitting
the analysis of problems
with very large constraint matrices. The
size of a problem that can be
analyzed is dependent on the speed and
amount of memory on the
computer, but problems with two to three
thousand constraints and more
than six thousand variables have been tested
on ordinary PC's.
- MPS files:
procedures are available for translating MPS
formatted files.
Other Product Features
LPMT is
designed to solve
small and large scale linear programming
problems. LPMT can be
initialized with a starting value, such as the
solution to a previous
problem which is similar to the one being
solved. This feature can
dramatically reduce the number of iterations
required to find a
feasible starting point.
Features
- Upper and lower finite bounds can be
provided for variables and constraints
- Problem type (minimization or
maximization)
- Constraint types (<=, >=, =)
- Choice of tolerances
- Pivoting rules
Computes
- The value of the variables and the
objective function upon termination, and
returns the dual variables
- State of each constraint
- Uniqueness and quality of solution
- Multiple optimal solutions if they exist
- Number of iterations required
- A final basis
- Can generate iterations log and/or final
report, if requested
Platform: Windows, Mac and Linux.
Requirements: GAUSS/GAUSS Light version 8.0 or higher.
Linear Regression MT
The Linear Regression MT
application module is a set
of procedures for estimating single equations
or a simultaneous system
of equations. It allows constraints on
coefficients, calculates het-con
standard errors, and includes two-stage least
squares, three-stage
least squares, and seemingly unrelated
regression. It is thread-safe
and takes advantage of structures found in
later versions of
GAUSS.
Features
- Calculates heteroskedastic-consistent
standard errors, and performs
both influence and collinearity diagnostics
inside the ordinary least
squares routine (OLS)
- All regression procedures can be run at a
specified data range
- Performs multiple linear hypothesis
testing with any form
- Estimates regressions with linear
restrictions
- Accommodates large data sets with
multiple variables
- Stores all important test statistics and
estimated coefficients in an efficient
manner
- Both three-stage least squares and
seemingly unrelated regression can be
estimated iteratively
- Thorough Documentation
- The comprehensive user's guide includes
both a
well-written tutorial and an informative
reference section. Additional
topics are included to enrich the usage of
the procedures. These
include:
- Joint confidence region for beta
estimates
- Tests for heteroskedasticity
- Tests of structural change
- Using ordinary least squares to estimate
a translog cost function
- Using seemingly unrelated regression to
estimate a system of cost share equations
- Using three-stage least squares to
estimate Klein's Model I
Platform: Windows, Mac, and Linux.
Requirements: GAUSS/GAUSS Light version 8.0 or higher.
Loglinear Analysis MT
The Loglinear
Analysis MT
application module (LOGLIN) contains
procedures for the analysis of
categorical data using loglinear analysis.
This application is
thread-safe and takes advantage of structures.
The estimation is based on the assumption that
the cells of the K-way
table are independent Poisson random
variables. The parameters are
found by applying the Newton-Raphson method
using an algorithm found in
A. Agresti (1984) Analysis of Ordinal
Categorical Data.
You may construct your own design matrix or
use LOGLIN procedures to
compute one for you. You may also select the
type of constraint and the
parameters.
Features
- Fits a
hierarchical model given fit configurations
- Will fit all
3-way hierarchical models of a table
- Provides for
cell weights
- LOGLIN can
estimate most
of the models described in such texts as
Y.M.M. Bishop, S.E. Fienberg,
and P.W. Holland (1975) Discrete
Multivariate Analysis, S. Haberman
(1979) Analysis of Qualitative Data, Vols. 1
and 2, as well as the book
by A. Agresti.
Platform: Windows, Mac and Linux.
Requirements: GAUSS/GAUSS Light version 8.0 or higher.
Maximum Likelihood (MaxlikMT) MT 2.0
MaxlikMT 2.0 contains a set
of procedures for the solution of the maximum
likelihood problem with bounds on parameters.
Major
Features of MaxLikMT
- Structures
- Simple bounds
- Hypothesis testing for models with bounded
parameters
- Log-likelihood function
- AlgorithmSecant algorithms
- Line search methods
- Weighted maximum likelihood
- Active and inactive parameters
- Bounds
In MaxlikMT,
the same
procedure computing the log-likelihood or
objective function will be
used to compute analytical derivatives as well
if they are being
provided. Its return argument is a
maxlikmtResults structure with three
members, a scalar, or Nx1 vector containing
the log-likelihood (or
objective), a 1xK vector, or NxK matrix of
first derivatives, and a KxK
matrix or NxKxK array of second derivatives
(it needs to be an array if
the log-likelihood is weighted).
Of course the derivatives are optional, or
even partially optional,
i.e., you can compute a subset of the
derivatives if you like and the
remaining will be computed numerically. This
procedure will have an
additional argument which tells the function
which to compute, the
log-likelihood or objective, the first
derivatives, or the second
derivatives, or all three. This means that
calculations in common will
not have to be redone.
Threading in
MaxlikMT
If you have a
multi-core
processor you may take advantage of MaxlikMT’s
internally threaded
functions. An important advantage of threading
occurs in computing
numerical derivatives. If the derivatives are
computed numerically,
threading will significantly decrease the time
of computation.
Example
We ran a very small problem on a quad-core
machine. As is the case for
most real world problems, not all sections of
the code are able to be
run in parallel. Therefore, the theoretical
limit for speed increase is
much less than (single-threaded execution
time)/(number of cores).
Also, in a problem with very short execution
time, threading overhead
becomes a larger percentage of overall
computing time.
Even so, the execution time of our program was
cut dramatically:
Single-threaded execution time: 0.095750000
minutes
Multi-threaded execution time: 0.0382667
minutes
That is a greater than 250% speed increase!
Larger speed increases can be seen with larger
problems.
MaxlikMT uses structures for input, control,
and output. Structures add
flexibility and help organize information.
MaxlikMT uses the DS and PV
structures that are available in the GAUSS
Run-Time Library.
The DS Structure
The DS structure is completely flexible,
allowing you to pass anything
you can think of into your procedure. There is
a member of the
structure for every GAUSS data type.
struct DS {
scalar type;
matrix dataMatrix;
array dataArray;
string dname;
string array vnames;
};
The PV
Structure
The PV structure revolutionizes how you pass
the parameters into the
procedure. No longer do you have to struggle
to get the parameter
vector into matrices for calculating the
function and its derivatives,
trying to remember, or figure out, which
parameter is where in the
vector.
If your log-likelihood uses matrices or
arrays,you can store them
directly into the PV structure and remove them
as matrices or arrays
with the parameters already plugged into them.
The PV structure can
handle matrices and arrays in which some of
their elements are fixed
and some free. It remembers the fixed
parameters and knows where to
plug in the current values of the free
parameters. It can also handle
symmetric matrices in which parameters below
the diagonal are repeated
above the diagonal.
b0 – Mean paramters.
garch – GARCH parameters.
arch – ARCH parameters.
omega – Constant in variance equation.
There is no longer any need to use global
variables. Anything the
procedure needs can be passed into it through
the DS structure. And
these new applications uses control structures
rather than global
variables. This means, in addition to thread
safety, that it is
straightforward to nest calls to MaxlikMT
inside of a call to MaxlikMT
,QNewtonmt, QProgmt, or EQsolvemt.
Functions
- MaxlikMT: Computes estimates of
parameters of a maximum likelihood
function with bounds on parameters.
- MaxlikMTBayes: Bayesian Inference using
weighted maximum likelihood bootstrap.
- MaxlikMTBoot: Computes bootsrap
estimates.
- MaxlikMTProfile: Computes profile t
plots and likelihood profile traces for
maximum likelihood models.
- MaxlikMTProfileLimits: Computes
confidence limits by inversion of the
likelihood ratio statistic.
- MaxlikMTInverseWaldLimits: Computes
confidence limits by inversion of the Wald
statistic.
- MaxlikMTControlCreate: Creates a default
instance of type MaxlikMTControl.
- MaxlikMTResultsCreate: Creates a default
instance of type MaxlikMTResults.
- ModelResultsCreate: Creates a default
instance of type ModelResults.
- MaxlikMTPrt: Formats and prints the
output form a call to MaxlikMT.
Platform: Windows, Mac, and Linux.
Requirements: GAUSS/GAUSS Light version 10 or higher; Linux requires version 10.0.4 or higher.
Nonlinear Equations MT
The Nonlinear
Equations
MT applications module (NLSYS) solves systems
of nonlinear equations
where there are as many equations as unknowns.
This application is
thread-safe and takes advantage of structures
found in later versions
of GAUSS.
The functions must be continuous and
differentiable. You may provide a
function for calculating the Jacobian, if
desired. Otherwise NLSYS will
compute the Jacobian numerically. You can also
select from two descent
algorithms, the Newton method or the secant
update method, and from two
step-length methods, a quadratic/cubic method,
or the hookstep method.
Platform: Windows, Mac and Linux.
Requirements: GAUSS/GAUSS Light version 8.0 or higher.
Optimization MT (OPMT) 1.0
OPMT is intended for the
optimization of functions.
It has many features, including a wide
selection of descent algorithms,
step-length methods, and "on-the-fly"
algorithm switching. Default
selections permit you to use Optimization with
a minimum of programming
effort. All you provide is the function to be
optimized and start
values, and OPMT does the rest.
Special Features in Optimization MT 1.0
-
Internally threaded.
-
Uses structures.
-
Allows for placing bounds on the
parameters.
-
Allows for computing a subset of the
derivatives
analytically, and for combining the
calculation of the function and
derivatives, thus reducing calculations in
common between function and
derivatives.
- More than 25 options can be easily
specified by the user to control the
optimization
- Descent algorithms include: BFGS, DFP,
Newton, steepest descent, and PRCG
- Step length methods include: STEPBT,
BRENT, and a step-halving method
- A "switching" method may also be selected
which
switches the algorithm during the iterations
according to two criteria:
number of iterations, or failure of the
function to decrease within a
tolerance
Threading in
OPTMT
If you have a multi-core processor you
may take
advantage of this capability by selecting
threading. Activate threading
by setting the useThreads member of the
optmtControl structure to 1.
struct optmtControl c0; /* Instantiate a
structure, c0 */
c0 = optmtControl Create; /* set c0 to default
values. */
c0.useThreads = 1; /* activate threading */
An important advantage of threading occurs in
computing numerical
derivatives. If the derivatives are computed
numerically, threading
will significantly decrease the time of
computation.
Speed increases are similar to those observed
with CMLMT, COMT and
MLMT, approximately 300% faster on a quad-core
machine for medium-small
or larger problems.
Structures
OPTMT uses the DS and PV structures that are
available in the GAUSS Run-Time Library.
The DS
Structure
The DS structure is completely flexible,
allowing you to pass anything
you can think of into your procedure. There is
a member of the
structure for every GAUSS data type.
struct DS {
scalar type;
matrix dataMatrix;
array dataArray;
string dname;
string array vnames;
};
The PV
Structure
The PV structure revolutionizes how you pass
the parameters into the
procedure. No longer do you have to struggle
to get the parameter
vector into matrices for calculating the
function and its derivatives,
trying to remember, or figure out, which
parameter is where in the
vector.
If your log-likelihood uses matrices or
arrays,you can store them
directly into the PV structure and remove them
as matrices or arrays
with the parameters already plugged into them.
The PV structure can
handle matrices and arrays in which some of
their elements are fixed
and some free. It remembers the fixed
parameters and knows where to
plug in the current values of the free
parameters. It can also handle
symmetric matrices in which parameters below
the diagonal are repeated
above the diagonal.
b0 – Mean paramters.
garch – GARCH parameters.
arch – ARCH parameters.
omega – Constant in variance equation.
There is no longer any need to use global
variables. Anything the
procedure needs can be passed into it through
the DS structure. And
these new applications uses control structures
rather than global
variables. This means, in addition to thread
safety, that it is
straightforward to nest calls to OPTMT inside
of a call to OPTM,
QNewtonmt, QProgmt, or EQsolvemt.
Improved
Algorithm
Optimization implements the numerically
superior Cholesky
factorization, solve and update methods for
the BFGS, DFP and Newton
algorithms. The Hessian, or its estimate, are
updated rather than the
inverse of the Hessian, and the descent is
computed using a solve. This
results in better accuracy and improved
convergence over previous
methods.
Simple Bounds
Bounds may be placed on parameters. This can
be very important for
models with a limited parameter space outside
of which the
log-likelihood is not defined.
Platform: Windows, Mac, and Linux.
Requirements: GAUSS/GAUSS Light version 10 or higher.
Time Series MT 2.1
Times Series MT
provides for
comprehensive treatment of time series models,
including model
diagnostics, MLE estimation, and forecasts.
Time Series MT tools covers
panel series models including random effects
and fixed effects, while
allowing for unbalanced panels.
Features
- Estimate models with multiple structural breaks (New)
- Estimate Threshold Autoregressive models (New)
- Rolling and recursive OLS estimation (New)
- Weighted Maximum Likelihood
- ARIMA model estimation and forecasts
- Exact full information maximum likelihood
estimation of VARMAX, VARMA, ARIMAX, and ECM
models.
- Standard time series diagnostic tests
including unit root tests, cointegration
tests, and lag selection tests.
Examples
Structural break model. Click here.
Threshold Autoregressive Model. Click here.
Rolling and recursive OLS estimation. Click here.
ARMA model. Click here.
Estimate and the autocorrelations,
autocovariances, and coefficients of
a regression model with autoregressive errors
of any specified order. Click here.
switchmt: Markov-Switching model. Click here.
Provide a GAUSS procedure for estimation of
the parameters of the Markov switching
regression model. Click here.
Platform: Windows, Mac and Linux.
Requirements: GAUSS/GAUSS Light version 13.1 or higher.
© Copyright 2015 Aptech
Systems, Inc.

|
|


