COMT solves the Nonlinear Programming problem, subject to general constraints on the parameters – linear or nonlinear, equality or inequality, using the Sequential Quadratic Programming method in combination with several descent methods selectable by the user.
COMT’s ability to handle general nonlinear functions and nonlinear constraints along with other features, such as the Trust Region Method, allow you to solve a wide range of sophisticated optimization problems. Built on the speed and number crunching ability of the GAUSS platform, COMT quickly computes solutions to large problems, making it ideal for large scale Monte Carlo or Bootstrap optimizations.
VERSION 2.0 IS EASIER TO USE THAN EVER!
- New syntax options eliminate the need for PV and DS structures:
- Decreasing the required code up to 25%.
- Decreasing runtime up to 20%.
- Simplifying usage.
- Optional dynamic arguments make it simple and transparent to add extra data arguments beyond model parameters to your objective function.
- Updated documentation and examples.
- Fully backwards compatible with COMT 1.0.
- Platform: Windows, Mac, and Linux.
- Requirements: GAUSS/GAUSS Engine/GAUSS Light v16 or higher.
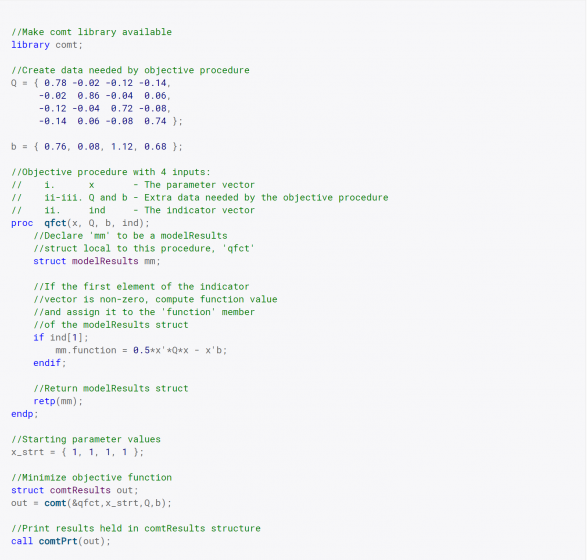
Below is a full example for a simple nonlinear optimization problem.
KEY FEATURES
DESCENT METHODS
- BFGS (Broyden, Fletcher, Goldfarb and Powell).
- Modifed BFGS.
- DFP (Davidon, Fletcher and Powell).
- Newton-Raphson.
LINE SEARCH METHODS
- Augmented trust region method.
- STEPBT.
- Brent’s method.
- Half.
- Strong Wolfe’s conditions.
CONSTRAINT TYPES
- Linear equality and inequality constraints.
- Nonlinear equality and inequality constraints.
- Bounded parameters.
ADVANTAGES
FLEXIBLE
- Supports arbitrary user-provided nonlinear equality and inequality constraints.
- Linear equality and inequality constraints.
- Bounded parameters.
- Specify fixed and free parameters.
- Dynamic algorithm switching.
- Compute all, a subset, or none of the derivatives numerically.
- Easily pass data other than the model parameters as extra input arguments.
EFFICIENT
- Threaded and thread-safe.
- Option to avoid computations that are the same for the objective function and derivatives.
- The tremendous speed of user-defined procedures in GAUSS speeds up your optimization problems.
TRUSTED
- For more than 30 years, leading researchers have trusted the efficient and numerically sound code in the GAUSS optimization packages to keep them at the forefront of their fields.
EXAMPLES
Below is a full example for a simple nonlinear optimization problem.
© 2026 Aptech Systems, Inc. All rights reserved.
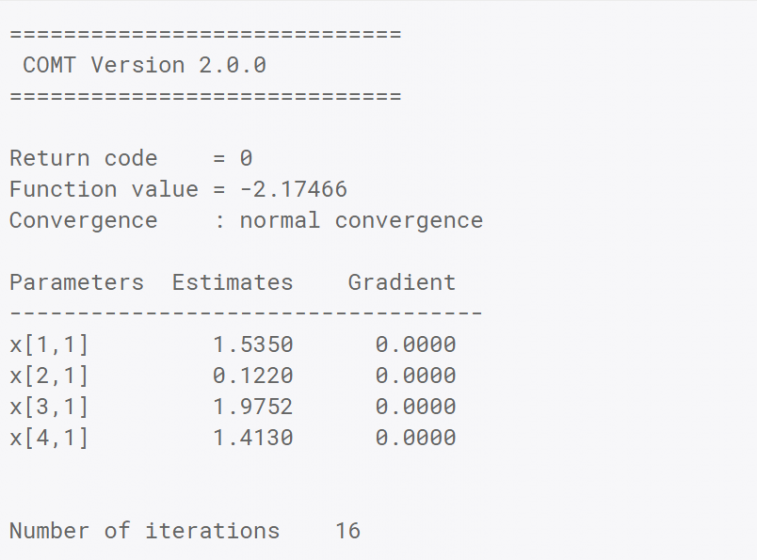
The above example will create the following report:
DETAILS
Novice users will typically leave most of these options at the default values. However, they can be a great help when tackling more difficult problems.
| CONTROL OPTIONS | |
|---|---|
|
LINEAR EQUALITY CONSTRAINTS |
Optional, simple to specify, linear equality constraints. |
|
LINEAR INQEQUALITY CONSTRAINTS |
Optional, simple to specify, linear inequality constraints. |
|
NONLINEAR EQUALITY CONSTRAINTS |
Option to provide a procedure to compute nonlinear equality constraints. |
| NONLINEAR INQEQUALITY CONSTRAINTS | Option to provide a procedure to compute nonlinear inequality constraints. |
|
PARAMETER BOUNDS |
Simple parameter bounds of the type: lower_bd ≤ x_i ≤ upper_bd. |
|
FEASIBLE TEST |
Controls whether parameters are checked for feasibility during line search. |
|
TRUST RADIUS |
Set the size of the trust radius, or turn off the trust region method. |
|
DESCENT ALGORITHMS |
BFGS, Modified BFGS, DFP and Newton. |
|
ALGORITHM SWITCHING |
Specify descent algorithms to switch between based upon the number of elapsed iterations, a minimum change in the objective function or line search step size. |
| LINE SEARCH METHOD | Augmented Lagrangian Penalty, STEPBT (quadratic and cubic curve fit), Brent’s method, half-step or Strong Wolfe’s Conditions. |
|
ACTIVE PARAMETERS |
Control which parameters are active (to be estimated) and which should be fixed to their start value. |
|
GRADIENT METHOD |
Either compute an analytical gradient, or have COMT compute a numerical gradient using the forward, central or backwards difference method. |
|
HESSIAN METHOD |
Either compute an analytical Hessian, or have COMT compute a numerical Hessian using the forward, central or backwards difference method. |
|
GRADIENT CHECK |
Compares the analytical gradient computed by the user supplied function with the numerical gradient to check the analytical gradient for correctness. |
|
RANDOM SEED |
Starting seed value used by the random line search method to allow for repeatable code. |
|
PRINT OUTPUT |
Controls whether (or how often) iteration output is printed and whether a final report is printed. |
| GRADIENT STEP | Advanced feature: Controls the increment size for computing the step size for numerical first and second derivatives. |
|
RANDOM SEARCH RADIUS |
The radius of the random search if attempted. |
|
MAXIMUM ITERATIONS |
Maximum iterations to converge. |
|
MAXIMUM ELAPSED TIME |
Maximum number of minutes to converge. |
|
MAXIMUM RANDOM SEARCH ATTEMPTS |
Maximum allowed number of random line search attempts. |
|
CONVERGENCE TOLERANCE |
Convergence is achieved when the direction vector changes less than this amount. |